平面点集# 内点
∃ U ( P ) s . t . U ⊂ E \exists \mathrm{U}(P)\; s.t. \mathrm{U}\subset \mathrm{E} ∃ U ( P ) s . t . U ⊂ E 外点
∃ U ( P ) s . t . U ( P ) ∩ E = ∅ \exists \mathrm{U}(P)\; s.t. \mathrm{U}(P)\cap E = \emptyset ∃ U ( P ) s . t . U ( P ) ∩ E = ∅ 边界点
∀ U ( P ) s . t . ∃ P 1 ( ∈ E ) , P 2 ( ∉ E ) ∈ U ( P ) \forall \mathrm{U}(P)\; s.t. \exists P_1(\in E), P_2(\notin E) \in \mathrm{U}(P) ∀ U ( P ) s . t .∃ P 1 ( ∈ E ) , P 2 ( ∈ / E ) ∈ U ( P ) 聚点
∃ U ˚ ( P ) s . t . ∃ P 1 ( ∈ E ) ∈ U ˚ ( P ) \exists \mathring{\mathrm{U}}(P)\; s.t. \exists P_1(\in E) \in \mathring{\mathrm{U}}(P) ∃ U ˚ ( P ) s . t .∃ P 1 ( ∈ E ) ∈ U ˚ ( P ) 孤立点
P ∈ E ∧ ∃ U ˚ P ∩ E = ∅ P \in E \land \exists \mathring{\mathrm{U}}{P} \cap E = \emptyset P ∈ E ∧ ∃ U ˚ P ∩ E = ∅ 闭集
∂ E ⊂ E \partial E \subset E ∂ E ⊂ E 开集
∂ E ⊈ E \partial E \nsubseteq E ∂ E ⊈ E 除此之外还有非开非闭集
连通集
任意两点可以连折线
区域
连通的开集就叫做区域
闭区域
区域并上边界点就是闭区域,一定是闭集,闭集不一定是闭区域,区别在连通性
有界集
存在圆包含该集合
无界集
有界集的否命题
内点 ∈ E \text{内点}\in E 内点 ∈ E 外点 ∉ E \text{外点} \notin E 外点 ∈ / E 开区域 ⇒ 边界点 ∈ E 闭区域 ⇒ 边界点 ∉ E \begin{aligned}
\text{开区域}\Rightarrow \text{边界点} \in E \\
\text{闭区域}\Rightarrow \text{边界点} \notin E
\end{aligned} 开区域 ⇒ 边界点 ∈ E 闭区域 ⇒ 边界点 ∈ / E 内点 ⊂ 聚点 \text{内点} \subset \text{聚点} 内点 ⊂ 聚点 边界点 ⊂ ? 聚点 ( 稠密,离散 ) \text{边界点}\overset{?} \subset \text{聚点}(\text{稠密,离散}) 边界点 ⊂ ? 聚点 ( 稠密,离散 ) 范围
0 ≤ a , b ^ ≤ π 0 \le \widehat{\mathbf{a},\mathbf{b}} \le \pi 0 ≤ a , b ≤ π 投影,是值
P r j b a = ∣ a ∣ ⋅ cos φ ( φ = a , b ^ ) \mathrm{Prj}_{\mathbf{b}}{\mathbf{a}} = |\mathbf{a}| \cdot \cos{\varphi}\quad (\varphi = \widehat{\mathbf{a},\mathbf{b}}) Prj b a = ∣ a ∣ ⋅ cos φ ( φ = a , b ) a \mathbf{a} a b \mathbf{b} b
a ⋅ b ∣ b ∣ ⋅ b ∣ b ∣ \frac{\mathbf{a} \cdot \mathbf{b}}{|\mathbf{b}|} \cdot \frac{\mathbf{b}}{|\mathbf{b}|} ∣ b ∣ a ⋅ b ⋅ ∣ b ∣ b 三维向量# 方向角# 范围
0 ≤ θ ≤ π 0 \le \theta \le \pi 0 ≤ θ ≤ π ( cos α , cos β , cos γ ) = ( x ∣ r ∣ , y ∣ r ∣ , z ∣ r ∣ ) (\cos{\alpha}, \cos{\beta}, \cos{\gamma}) = (\frac{x}{|r|},\frac{y}{|r|},\frac{z}{|r|}) ( cos α , cos β , cos γ ) = ( ∣ r ∣ x , ∣ r ∣ y , ∣ r ∣ z ) a × b = ∣ i ^ j ^ k ^ x a y a z a x b y b z b ∣ \mathbf{a} \times \mathbf{b} =
\begin{vmatrix}
\hat{i} &\hat{j} &\hat{k} \\
x_{\mathbf{a}} &y_{\mathbf{a}} &z_{\mathbf{a}} \\
x_{\mathbf{b}} &y_{\mathbf{b}} &z_{\mathbf{b}}
\end{vmatrix} a × b = i ^ x a x b j ^ y a y b k ^ z a z b a × ( b × c ) = ( a ⋅ c ) b − ( a ⋅ b ) c \mathbf{a} \times (\mathbf{b} \times \mathbf{c}) = (\mathbf{a} \cdot \mathbf{c})\mathbf{b} - (\mathbf{a} \cdot \mathbf{b})\mathbf{c} a × ( b × c ) = ( a ⋅ c ) b − ( a ⋅ b ) c d i s t a n c e = ∣ p ∣ 2 − ∣ p ⋅ v ∣ v ∣ ∣ 2 = ∣ p × v ∣ ∣ v ∣ distance = \sqrt{|\mathbf{p}|^2 - \left|\frac{\mathbf{p} \cdot \mathbf{v}}{|\mathbf{v}|}\right|^2}=\frac{|\mathbf{p}\times\mathbf{v}|}{|\mathbf{v}|} d i s t an ce = ∣ p ∣ 2 − ∣ v ∣ p ⋅ v 2 = ∣ v ∣ ∣ p × v ∣ 方程为
( α ( t ) , β ( t ) , γ ( t ) ) (\alpha(t), \beta(t), \gamma(t)) ( α ( t ) , β ( t ) , γ ( t )) 法平面# 方程为
α ′ ( t 0 ) ( x − α ( t 0 ) ) + β ′ ( t 0 ) ( y − β ( t 0 ) ) + γ ′ ( t 0 ) ( z − γ ( t 0 ) ) = 0 \alpha'(t_0)(x-\alpha(t_0))+\beta'(t_0)(y-\beta(t_0))+\gamma'(t_0)(z-\gamma(t_0)) = 0 α ′ ( t 0 ) ( x − α ( t 0 )) + β ′ ( t 0 ) ( y − β ( t 0 )) + γ ′ ( t 0 ) ( z − γ ( t 0 )) = 0 本质为自由度为2的有序数列的点集合
系数数组即为法向量
与平面# 范围
0 ≤ θ ≤ π 2 0 \le \theta \le \frac{\pi}{2} 0 ≤ θ ≤ 2 π 法向量夹角和平面夹角互补
cos θ = ∣ n 1 ⋅ n 2 ∣ ∣ n 1 ∣ ∣ n 2 ∣ \cos{\theta} = \frac{| \mathbf{n_1} \cdot \mathbf{n_2}|}{ |\mathbf{n_1}| |\mathbf{n_2}| } cos θ = ∣ n 1 ∣∣ n 2 ∣ ∣ n 1 ⋅ n 2 ∣ 与直线# 范围
0 ≤ θ ≤ π 2 0 \le \theta \le \frac{\pi}{2} 0 ≤ θ ≤ 2 π 与方向向量和法向量的夹角互补
sin θ = ∣ s ⋅ n 2 ∣ ∣ s ∣ ∣ n 2 ∣ \sin{\theta} = \frac{| \mathbf{s} \cdot \mathbf{n_2}|}{ |\mathbf{s}| |\mathbf{n_2}| } sin θ = ∣ s ∣∣ n 2 ∣ ∣ s ⋅ n 2 ∣ H = P − n ⋅ P + d ∥ n ∥ 2 n H=P-\frac{\mathbf{n}\cdot P+d}{\|\mathbf{n}\|^2}\mathbf{n} H = P − ∥ n ∥ 2 n ⋅ P + d n F ( x , y , z ) = 0 F(x,y,z) = 0 F ( x , y , z ) = 0 旋转轴
( α ( t ) , β ( t ) , γ ( t ) ) (\alpha(t), \beta(t), \gamma(t)) ( α ( t ) , β ( t ) , γ ( t )) 母线
( p ( i ) , q ( i ) , r ( i ) ) (p(i),q(i),r(i)) ( p ( i ) , q ( i ) , r ( i )) 由旋转轴法平面
α ′ ( t ) ( x − α ( t ) ) + β ′ ( t ) ( y − β ( t ) ) + γ ′ ( t ) ( z − γ ( t ) ) = 0 \alpha'(t)(x-\alpha(t))+\beta'(t)(y-\beta(t))+\gamma'(t)(z-\gamma(t)) = 0 α ′ ( t ) ( x − α ( t )) + β ′ ( t ) ( y − β ( t )) + γ ′ ( t ) ( z − γ ( t )) = 0 可反解出t = t ( x , y , z ) t = t(x,y,z) t = t ( x , y , z )
{ α ′ ( t ) ( x − α ( t ) ) + β ′ ( t ) ( y − β ( t ) ) + γ ′ ( t ) ( z − γ ( t ) ) = 0 x = p ( i ) y = q ( i ) z = r ( i ) \begin{cases}
\alpha'(t)(x-\alpha(t))+\beta'(t)(y-\beta(t))+\gamma'(t)(z-\gamma(t)) = 0 \\
x = p(i) \\
y = q(i) \\
z = r(i)
\end{cases} ⎩ ⎨ ⎧ α ′ ( t ) ( x − α ( t )) + β ′ ( t ) ( y − β ( t )) + γ ′ ( t ) ( z − γ ( t )) = 0 x = p ( i ) y = q ( i ) z = r ( i ) 五个变量四个方程得到i i i t t t
i = f ( t ) i = f(t) i = f ( t ) 则有母线
( p ( f ( t ) ) , q ( f ( t ) ) , r ( f ( t ) ) ) = ( u ( t ) , v ( t ) , w ( t ) ) (p(f(t)),q(f(t)),r(f(t))) = (u(t), v(t), w(t)) ( p ( f ( t )) , q ( f ( t )) , r ( f ( t ))) = ( u ( t ) , v ( t ) , w ( t )) 设任意动点P ( x , y , z ) P(x,y,z) P ( x , y , z )
则
P到旋转轴距离 = (u(t(x,y,z)), v(t(x,y,z)), w(t(x,y,z)))到旋转轴距离 \text{P到旋转轴距离}=\text{(u(t(x,y,z)), v(t(x,y,z)), w(t(x,y,z)))到旋转轴距离} P 到旋转轴距离 = (u(t(x,y,z)), v(t(x,y,z)), w(t(x,y,z))) 到旋转轴距离 为旋转曲面方程
法向量# ( F x , F y , F z ) (F_x, F_y, F_z) ( F x , F y , F z ) 切平面# 法向式
F x ( x 0 ) ( x − x 0 ) + F y ( y 0 ) ( y − y 0 ) + F z ( z 0 ) ( z − z 0 ) = 0 F_x(x_0)(x-x_0)+F_y(y_0)(y-y_0)+F_z(z_0)(z-z_0)=0 F x ( x 0 ) ( x − x 0 ) + F y ( y 0 ) ( y − y 0 ) + F z ( z 0 ) ( z − z 0 ) = 0 只约束了某一个平面的轮廓形状,在这个平面的法方向上自由平移轮廓,轮廓轨迹形成了柱型体,也就是柱体。可见,柱体由所在平面的轮廓方程决定
x 2 + y 2 = R 2 x^2+y^2=R^2 x 2 + y 2 = R 2 椭圆柱# x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2}+\frac{y^2}{b^2}=1 a 2 x 2 + b 2 y 2 = 1 旋转体# ( x − x 0 ) 2 + ( y − y 0 ) 2 + ( z − z 0 ) 2 = R 2 (x-x_0)^2+(y-y_0)^2+(z-z_0)^2=R^2 ( x − x 0 ) 2 + ( y − y 0 ) 2 + ( z − z 0 ) 2 = R 2
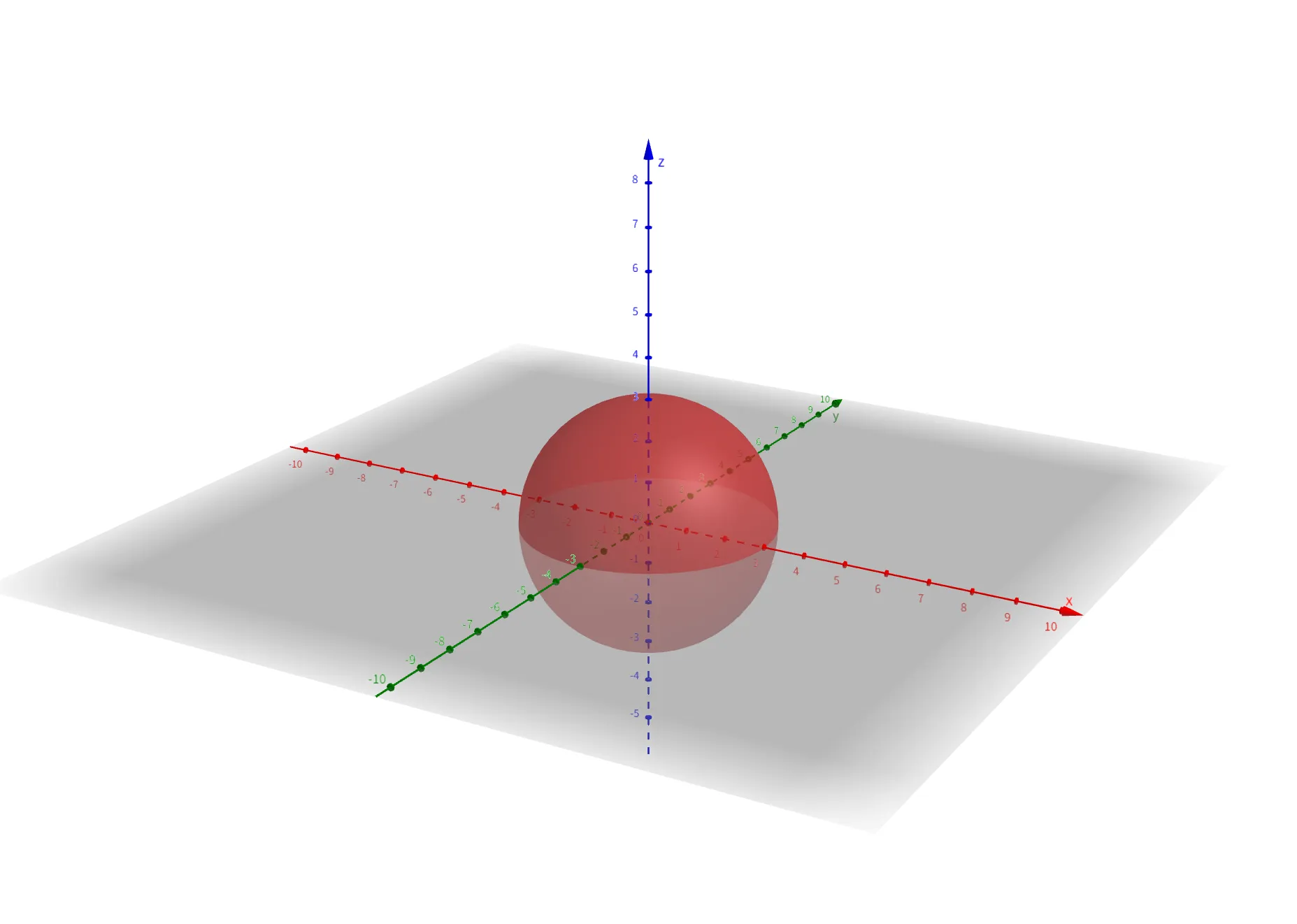
球面
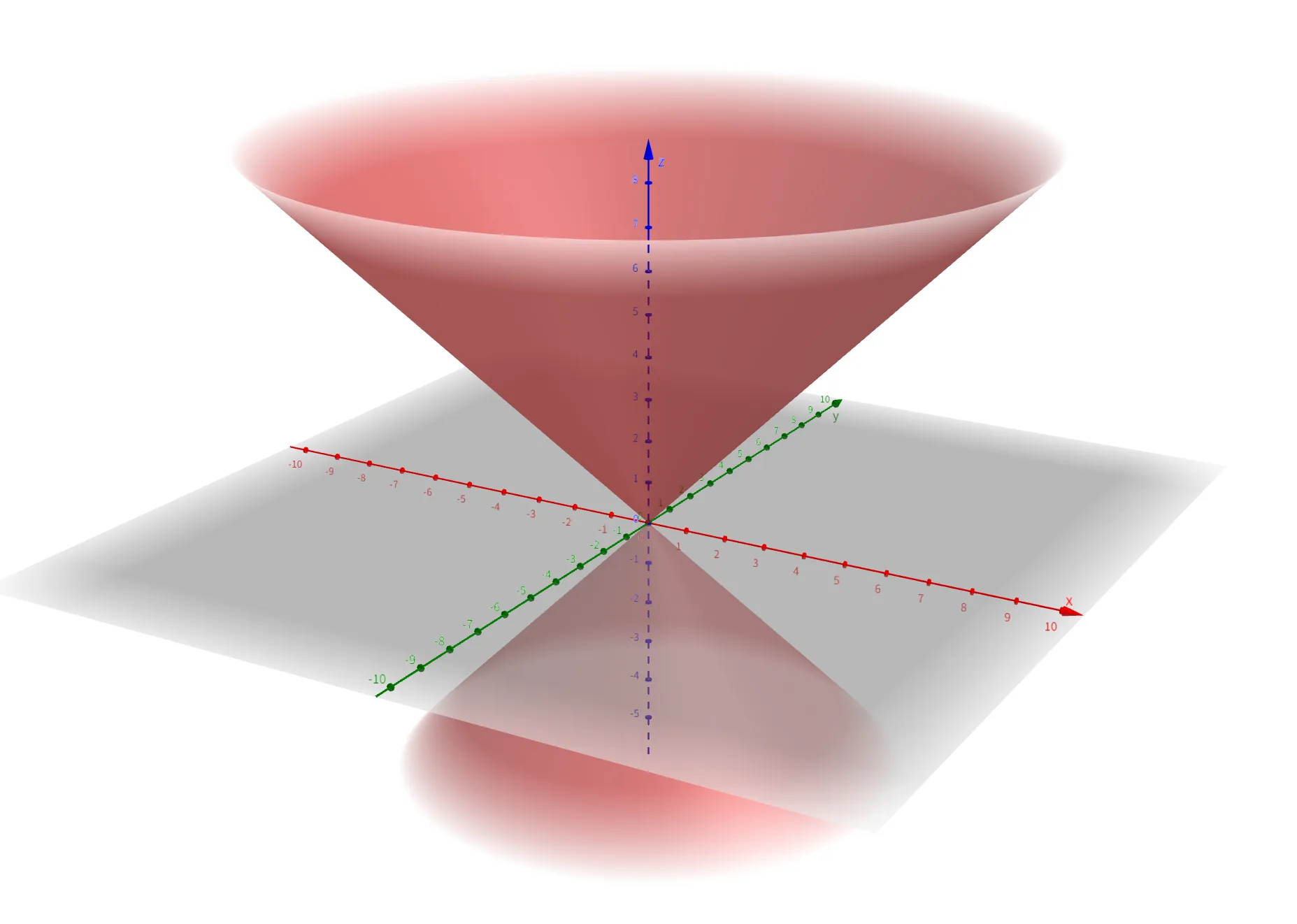
x 2 + y 2 + z 2 = R 2 x^2+y^2+z^2=R^2 x 2 + y 2 + z 2 = R 2 圆锥面# x 2 + y 2 = z 2 x^2+y^2=z^2 x 2 + y 2 = z 2
圆锥面
x 2 + y 2 = k 2 z 2 x^2+y^2=k^2z^2 x 2 + y 2 = k 2 z 2 将切面从垂直轴线旋转至平行轴线,为椭圆,抛物线,双曲线
椭圆锥面# x 2 a 2 + y 2 b 2 = z 2 c 2 \frac{x^2}{a^2}+\frac{y^2}{b^2}
=
\frac{z^2}{c^2} a 2 x 2 + b 2 y 2 = c 2 z 2
椭圆锥面
x 2 a 2 + y 2 b 2 − z 2 c 2 = 0 \frac{x^2}{a^2}+\frac{y^2}{b^2}
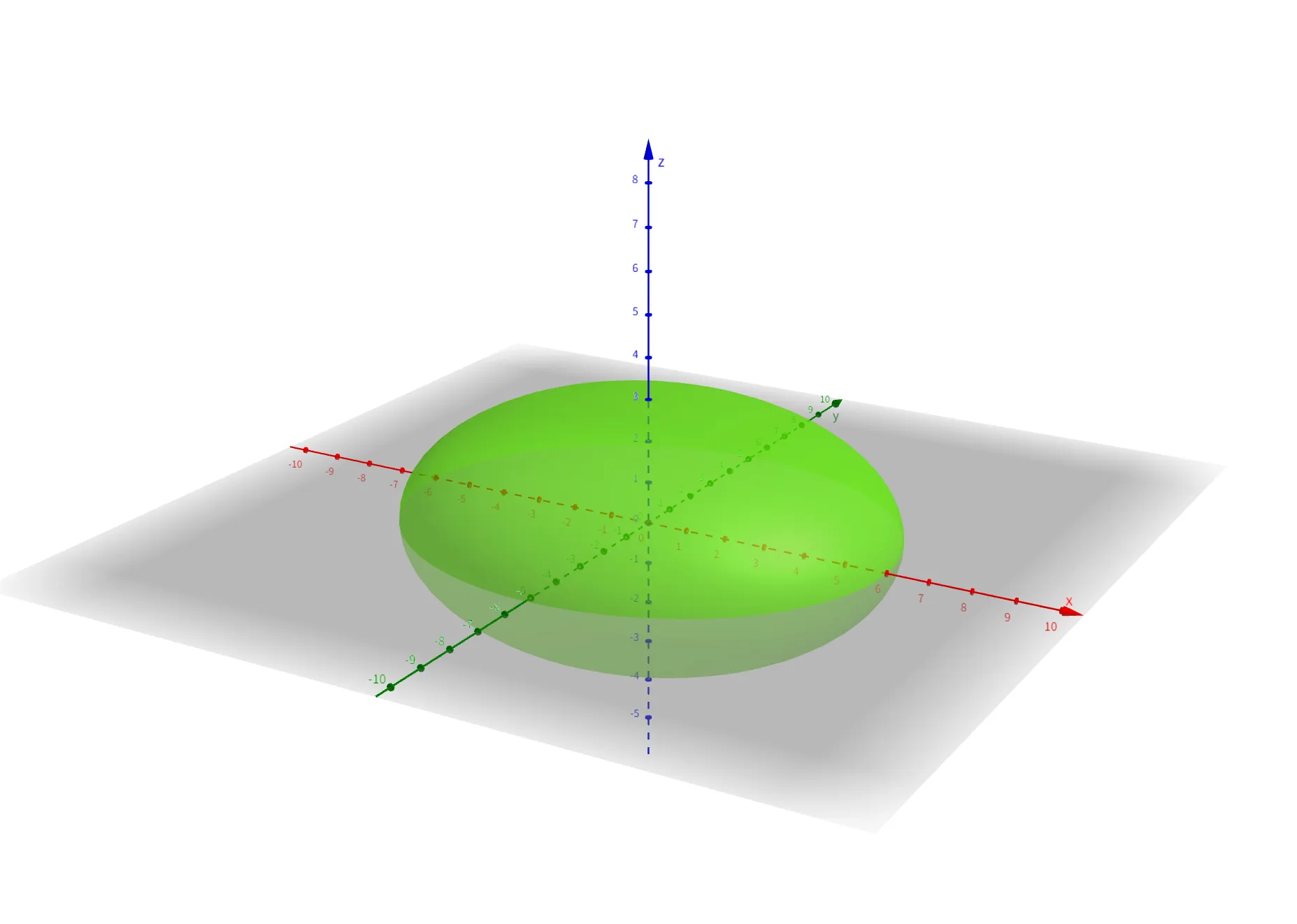
-\frac{z^2}{c^2}=0 a 2 x 2 + b 2 y 2 − c 2 z 2 = 0 二次曲面# 椭球面# x 2 a 2 + y 2 b 2 + z 2 c 2 = 1 \frac{x^2}{a^2}
+
\frac{y^2}{b^2}
+
\frac{z^2}{c^2}
=1 a 2 x 2 + b 2 y 2 + c 2 z 2 = 1
椭球面
单叶双曲面# x 2 a 2 + y 2 b 2 − z 2 c 2 = 1 \frac{x^2}{a^2}
+
\frac{y^2}{b^2}
-
\frac{z^2}{c^2}
=1 a 2 x 2 + b 2 y 2 − c 2 z 2 = 1
单叶双曲面
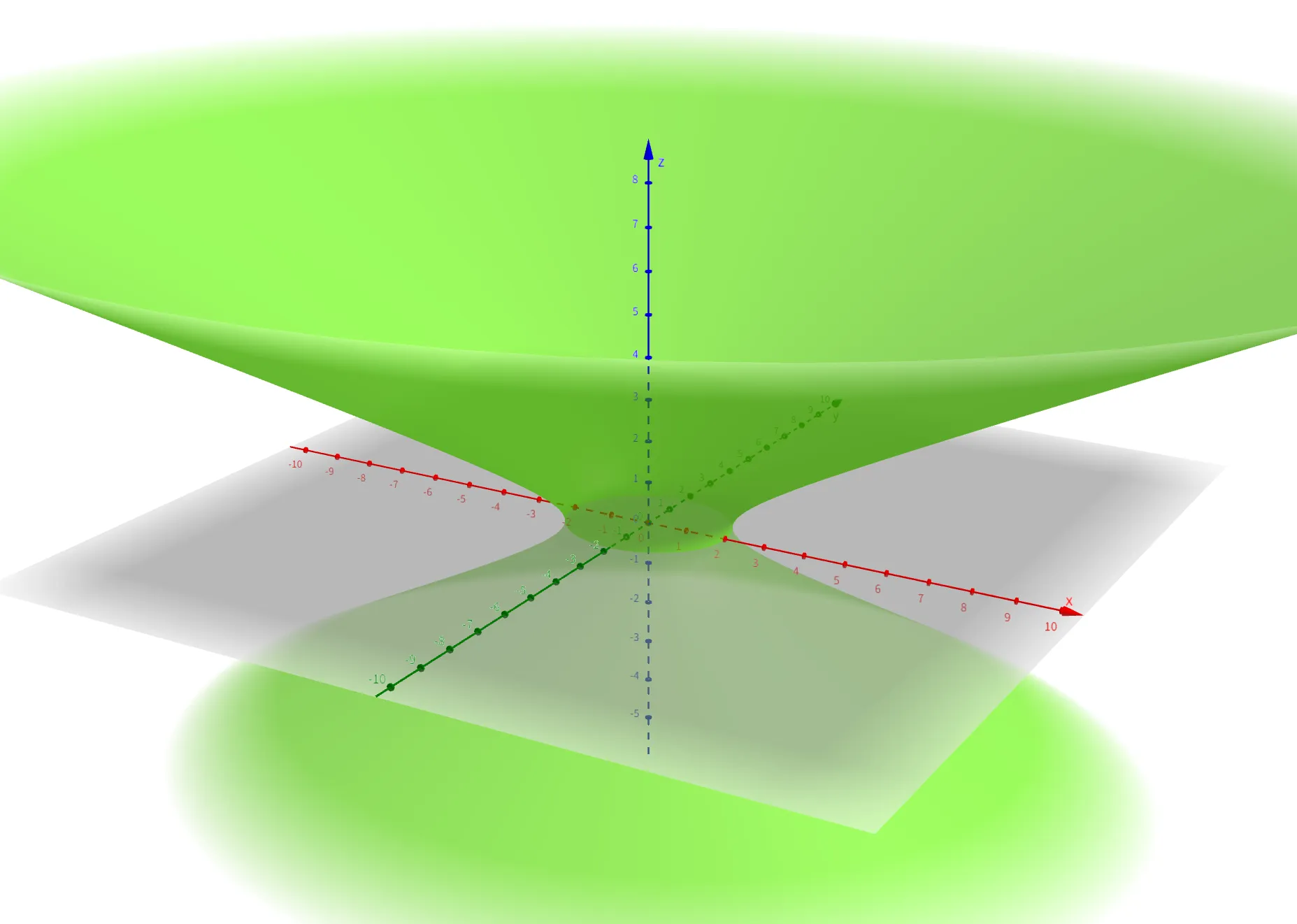
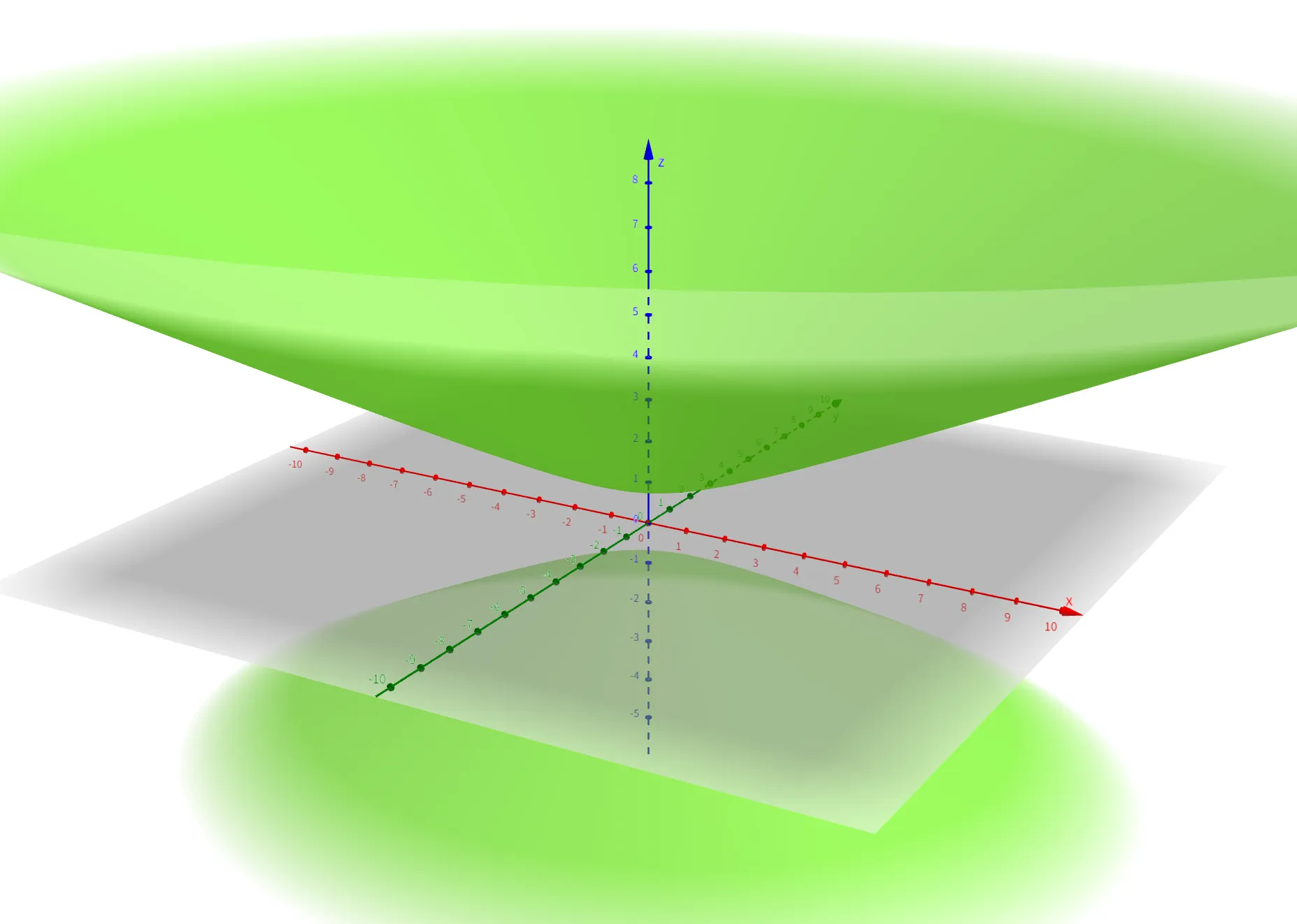
双叶双曲面# − x 2 a 2 − y 2 b 2 + z 2 c 2 = 1 -\frac{x^2}{a^2}
-\frac{y^2}{b^2}
+\frac{z^2}{c^2}
=1 − a 2 x 2 − b 2 y 2 + c 2 z 2 = 1
## 双叶双曲面
z 2 c 2 − x 2 a 2 − y 2 b 2 = 1 \frac{z^2}{c^2}
-
\frac{x^2}{a^2}
-
\frac{y^2}{b^2}
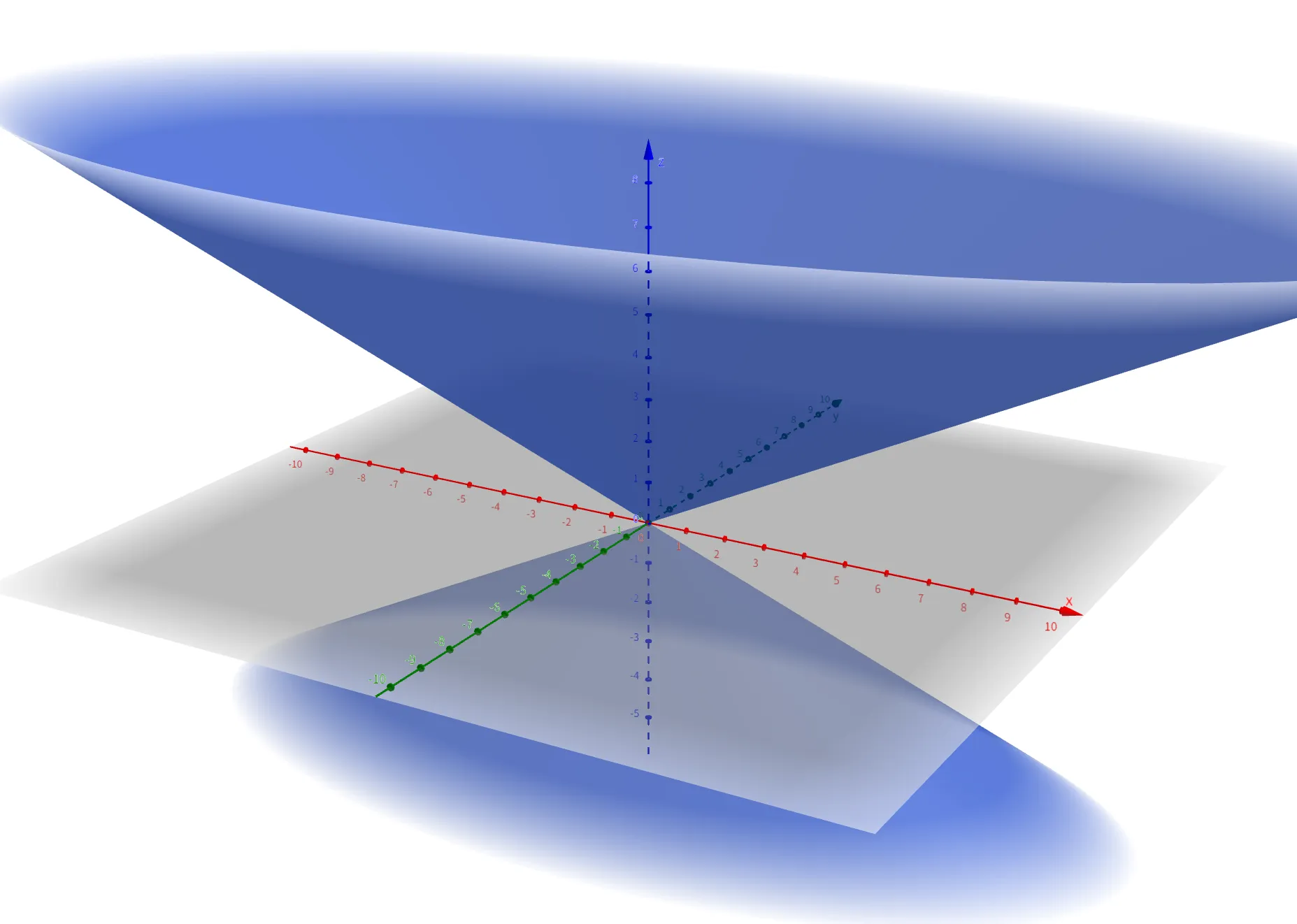
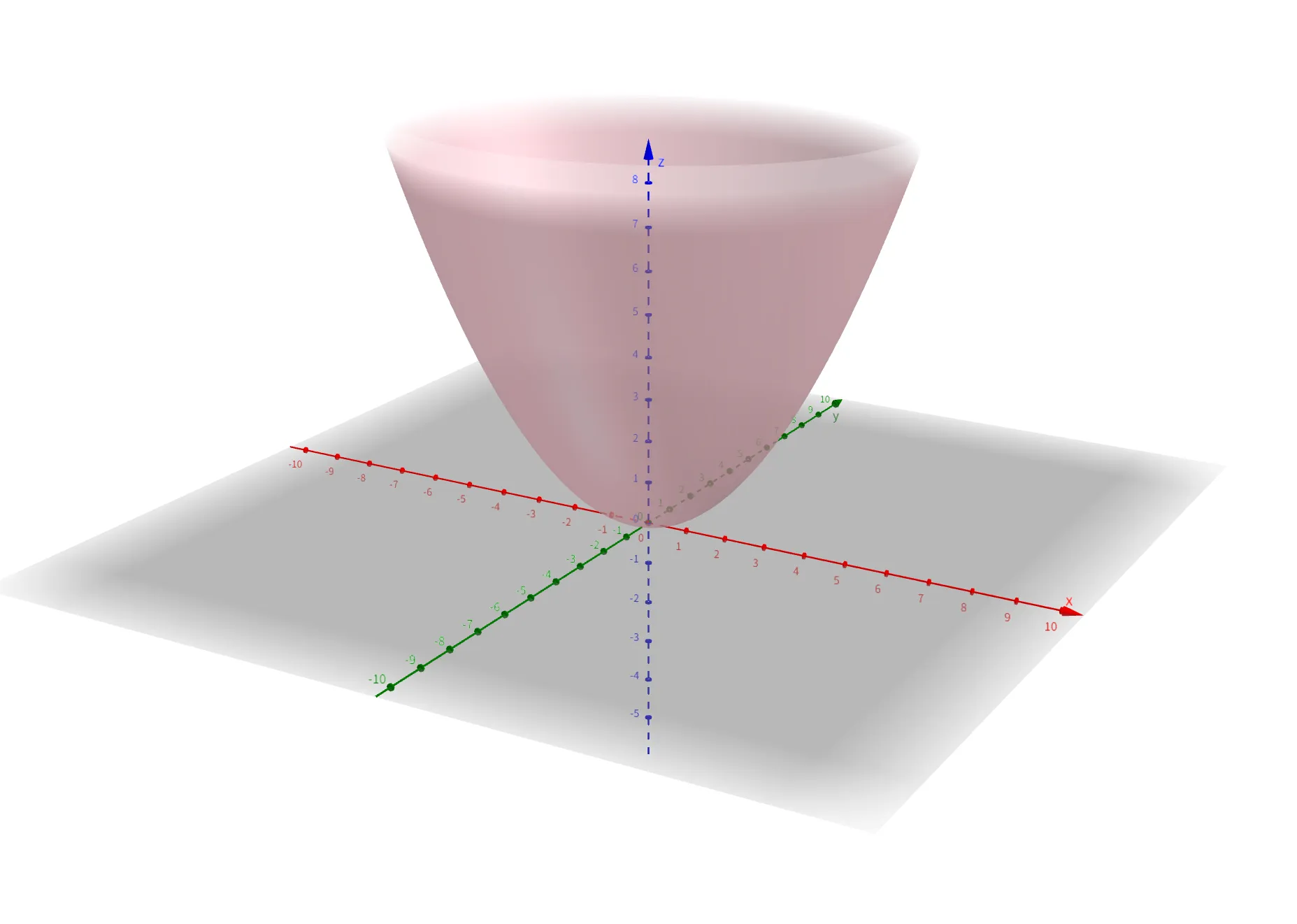
=1 c 2 z 2 − a 2 x 2 − b 2 y 2 = 1 椭圆抛物面# z = x 2 a 2 + y 2 b 2 z=
\frac{x^2}{a^2}
+
\frac{y^2}{b^2} z = a 2 x 2 + b 2 y 2
椭圆抛物面
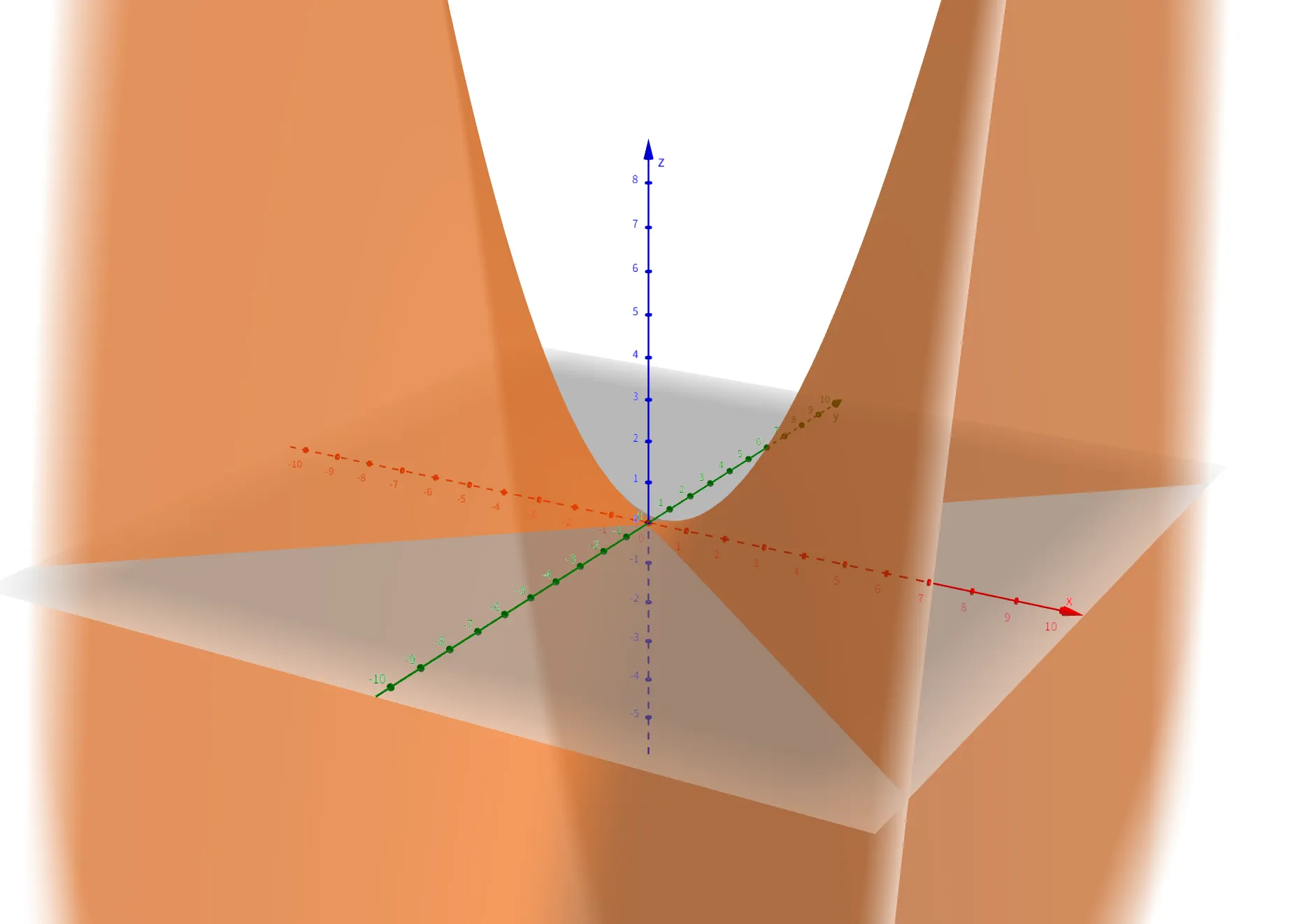
双曲抛物面(马鞍面)# z = x 2 a 2 − y 2 b 2 z=
\frac{x^2}{a^2}
-
\frac{y^2}{b^2} z = a 2 x 2 − b 2 y 2
双曲抛物面
二次曲面一般式# A x 2 + B y 2 + C z 2 + D x y + E x z + F y z + G x + H y + I z + J = 0 Ax^2+By^2+Cz^2
+Dxy+Exz+Fyz
+Gx+Hy+Iz+J=0 A x 2 + B y 2 + C z 2 + D x y + E x z + F y z + G x + H y + I z + J = 0 graph LR
st(("开始"))
jud0{"有非零常数项?"}
jud1{"系数有异号"}
jud2{"是否齐次"}
A["椭球面/双曲面"]
B["抛物面/圆锥"]
C["双曲面"]
D["椭球面"]
E["抛物面"]
F["圆锥"]
st--->jud0
jud0--->|"有"| A
jud0--->|"无"| B
A--->jud1
B--->jud2
jud1--->|"有"| C
jud1--->|"无"| D
jud2--->|"是"| F
jud2--->|"否"| E